Esse site utiliza cookies
Nós armazenamos dados temporariamente para melhorar a sua experiência de navegação e recomendar conteúdo do seu interesse.
Ao utilizar os nossos serviços, você concorda com as nossas políticas de privacidade.
Esse site utiliza cookies
Nós armazenamos dados temporariamente para melhorar a sua experiência de navegação e recomendar conteúdo do seu interesse.
Ao utilizar os nossos serviços, você concorda com as nossas políticas de privacidade.
Categoria de Programação
Postado em 31 maio 2023
Atualizado em 31 maio 2023
Palavras-chave: steering,behavior,perseguir,desviar,prever,futuro,comportamento,trajeto,busca,navegacao
Visualizações: 872
Os comportamentos de navegação (steering behaviors) foram introduzidos pela primeira vez em 1987. Desde então, eles passaram a ser usados em vários tipos de simulação. A primeira aparição dessa técnica de algoritmo foi em uma simulação de revoada de pássaros e um cardume de peixes.
Um conjunto de vários comportamentos possibilitam a simulação de agentes que se comportam como pássaros em uma revoada. Dentro desses comportamentos, já foram publicados os seguintes comportamentos:
Uma das vantagens de utilizar os comportamentos de navegação é a compatibilidade entre os comportamentos. É possível estender alguns comportamentos para que eles se tornem ainda mais realísticos. Os comportamentos de perseguição (pursuit) e esquiva (evade) são exemplos disso.
Os comportamentos de perseguição e esquiva são uma extensão dos comportamentos de busca (seek) e fuga (flee). Os comportamentos de busca e fuga simulam um agente com um desejo de ir em uma determinada direção. O desejo do agente é definido com base no alvo de referência. Em outras palavras, se o agente estiver buscando pelo alvo, a direção desejada será calculada através de uma subtração da distância entre os dois agentes. Essa direção será normalizada e em seguida multiplicada pelo velocidade máxima do agente. O resultado é uma pequena aproximação do agente em relação ao alvo de referência em cada frame. O comportamento de fuga é praticamente idêntico ao comportamento de busca, a única diferença é que a direção desejada será convertida para um valor negativo. O resultado disso é um distanciamento em relação ao alvo de diferença.
Assim como os comportamentos de busca e fuga, os comportamentos de perseguição e esquiva possuem os mesmos valores com um sinal oposto. Se o valor da perseguição é positivo, o valor da esquiva será negativa. A relação entre esses 4 comportamentos pode ser representada da seguinte maneira:
| # | Original | Extensão |
|---|---|---|
| 1 | Busca | Perseguição |
| 2 | Fuga | Esquiva |
O comportamento de perseguição estende o comportamento de busca e o comportamento de esquiva estende o comportamento de fuga. A perseguição e a esquiva preveem a trajetória que o alvo irá fazer no futuro, assim antecipando o movimento e tornando a simulação mais realista.
A perseguição pode ser usada para simular agentes que querem alcançar um determinado alvo. Além de ser simples de implementar traz resultados satisfatórios. A esquiva simula um agente tentanto evitar ser capturado, prevendo o movimento do perseguidor e esquivando de uma provável investida.
Antes de começar a usar os algoritmos de perseguição e evasão, vamos conferir como é uma perseguição usando o algoritmo de busca (seek).
Veja que o nosso agente fica logo atrás do alvo mas não pode capturá-lo. Com essa velocidade, poderíamos ter alcançado o alvo, mas o trajeto que o nosso agente percorre não aparenta ser muito eficiente.
A perseguição é uma extensão do comportamento de busca. Após obter o valor da força do movimento de busca, modificamos esse valor para prever a trajetório do alvo.
pursue(target) {
// Posição do alvo para calcular a distância entre os agentes
let targetPosition = target.position.clone();
// Velocidade do alvo para prever o trajeto do alvo
let targetVelocity = target.velocity.clone();
// Distância entre o nosso agente e o alvo
let distanceBetween = this.position - targetPosition;
// Calcula a escala da previsão do futuro
// Perceba que quanto mais os agentes se aproximam, menor é a escala
let differenceAhead = distanceBetween.magnitude / target.maxSpeed;
// Multipla o valor da velocidade do alvo para prever o trajeto
targetVelocity *= differenceAhead;
// Adiciona na coordenada atual a velocidade multiplicada pela escala
targetPosition += targetVelocity;
// Passa ao algoritmo de busca uma posição no futuro
return this.seek(targetPosition);
}
Primeiro, copiamos os vetores de coordenada e velocidade atual do alvo. Em seguida, calculamos a diferença da distância entre os dois agentes. Agora, veja a variável differenceAhead.
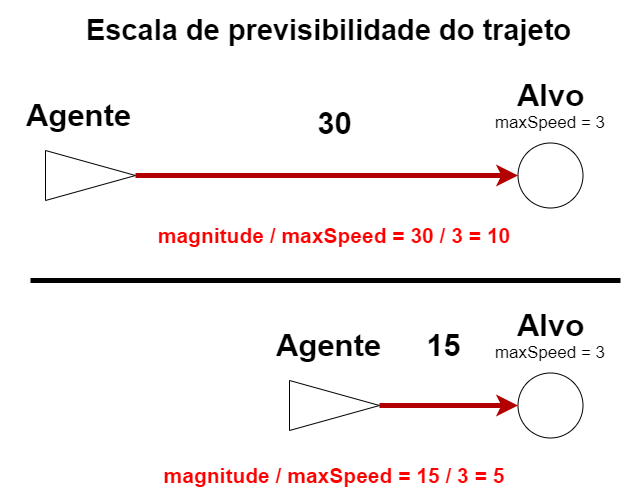
Veja que conforme a distância entre os agentes fica menor, a escala de previsibilidade do trajeto também diminui. Isso quer dizer que quando o agente 1 chegar o mais perto possível do agente 2, a escala de previsibilidade será provavelmente 1.
Ao multiplicar a escala de previsibilidade ao valor de posição atual do agente 2, apenas estamos adiantando esse valor.
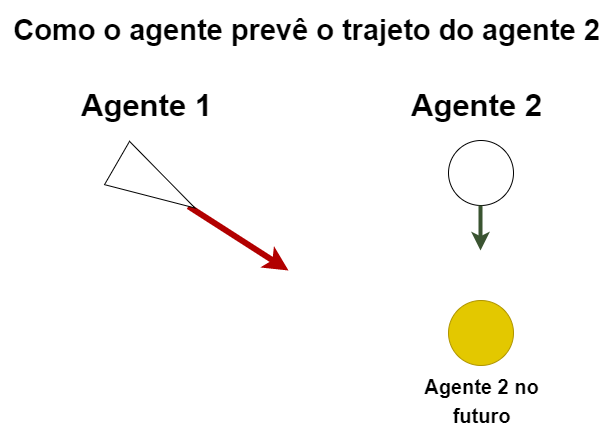
A coordenada atual do “agente 2 no futuro” será o valor a ser passado como parâmetro para a função buscar.
Em resumo, o agente 1 estima qual será a posição do alvo no futuro. Essa estimativa é baseada na velocidade e na direção do alvo.
Na demonstração acima, note que há um ponto branco se locomovendo junto. Esse ponto branco representa a posição que o nosso agente está perseguindo.
A evasão é o mesmo valor da perseguição, mas com um sinal negativo. Mas lembre-se que o comportamento de fuga também possui o mesmo valor do comportamento de busca com um sinal negativo. Logo, podemos simplesmente copiar e colar o código do comportamento de perseguição e mudar apenas a função para “this.flee”.
evade(target) {
let targetPosition = target.position.clone();
let targetVelocity = target.velocity.clone();
let distanceBetween = this.position - targetPosition;
let differenceAhead = distanceBetween.magnitude / target.maxSpeed;
targetVelocity *= differenceAhead;
targetPosition += targetVelocity;
return this.flee(targetPosition);
}
Agora, ao invés de perseguir, o agente irá tentar fugir do nosso agente estimando o trajeto no futuro.
Nessa demonstração diminuímos a velocidade do alvo para podermos acompanhá-lo.
Os comportamentos de perseguição e esquiva preveem o trajeto do alvo para tomarem decisões. Esse algoritmo pode ser eficiente em casos de simulação de captura e fuga de agentes.
Projetos práticos
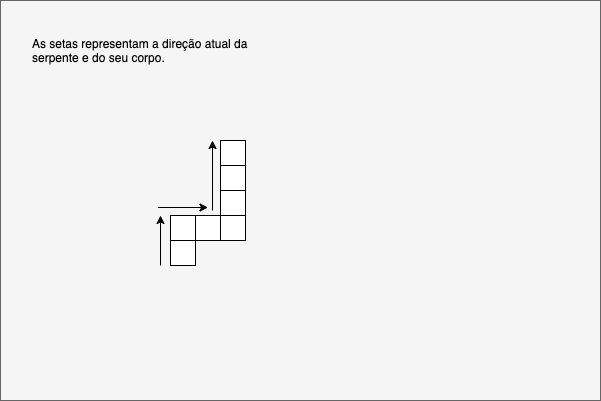
Programando o clássico jogo da serpente usando o framework p5.js. Tutorial indicado para iniciantes da programação que querem aprender os conceitos básico da área criando jogos.
Programando um jogo clássico de arcade usando javascript e p5.js. O usuário deve quebrar os blocos utilizando uma bola ao mesmo tempo que evita que a bola saia pela parte inferior da tela
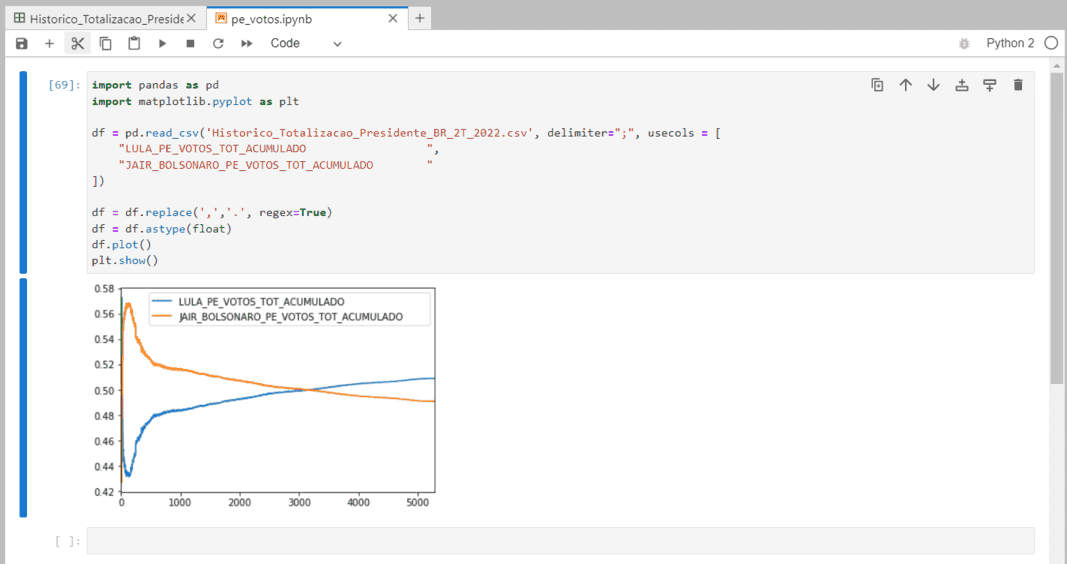
Simulação dos gráficos do segundo turno das eleições presidenciais, utilizando python e ferramentas de análise de dados, pandas e jupyter.
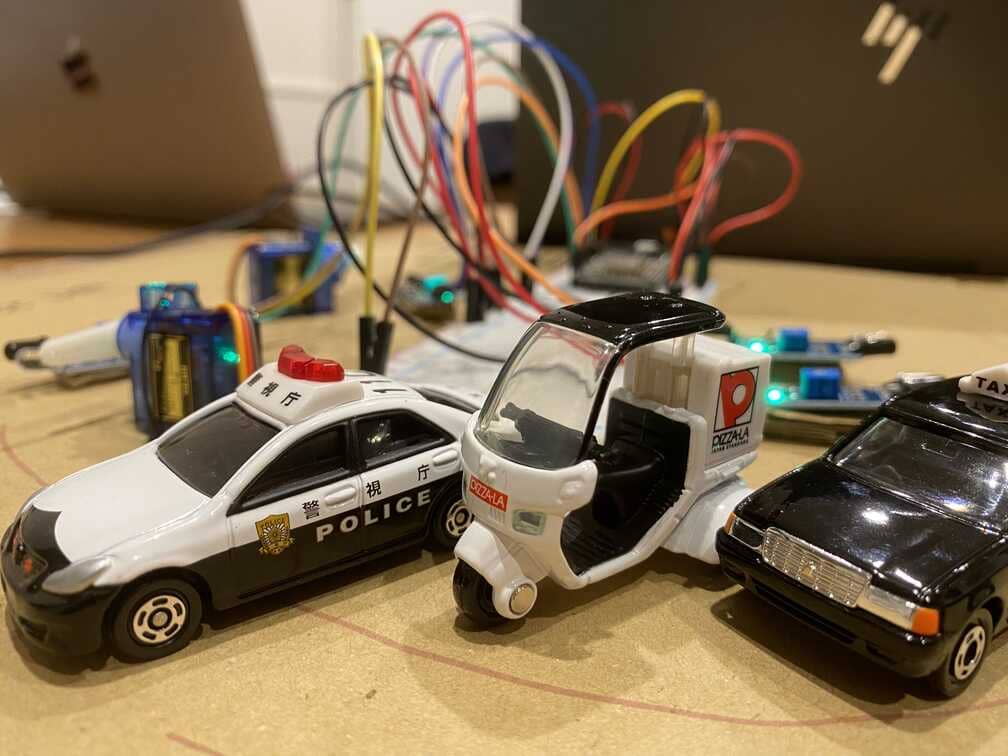
Desenvolvimento de um sistema de monitoramento que exibi todos os eventos que acontecem na garagem automatizada, como abertura de portões ou ocupação de vagas.
Desenvolvimento dos conceitos mais básicos do clássico pacman, como: mapa, animação, deslocamento e detector de colisões.
Existe muitos programadores que escrevem algoritmos mal planejados. Essa falta de planejamento dificulta a manutenção do aplicativo e aumenta a probabilidade de novos bugs.

Muitos serviços já utilizam a autenticação biométrica integrada com a inteligência artificial para melhorar a experiência do usuário, além de melhorar a segurança.
Um dos comportamentos de navegação (steering behaviors). Faz com que um agente siga um caminho pré-determinado pelo desenvolvedor.
A busca linear é um algoritmo de força bruta não muito eficiente, mas com grande simplicidade, sendo utilizada regularmente por programadores.
Política e filosofia que tem como objetivo aceitar pessoas de diferentes etnias, comportamentos e características como funcionário.
Algoritmo que busca o caminho com o menor custo entre dois pontos. É usado em jogos e aplicativos de navegação para calcular a menor distância possível.