Esse site utiliza cookies
Nós armazenamos dados temporariamente para melhorar a sua experiência de navegação e recomendar conteúdo do seu interesse.
Ao utilizar os nossos serviços, você concorda com as nossas políticas de privacidade.
Esse site utiliza cookies
Nós armazenamos dados temporariamente para melhorar a sua experiência de navegação e recomendar conteúdo do seu interesse.
Ao utilizar os nossos serviços, você concorda com as nossas políticas de privacidade.
Categoria de Programação
Postado em 29 abril 2023
Atualizado em 29 abril 2023
Palavras-chave: steering,behavior,busca,fuga,chegada,seek,flee,arrival,navegacao,comportamento
Visualizações: 814
Steering behaviors (comportamentos de navegação) são um conjunto de técnicas de algoritmo para simular o comportamentos realísticos de animais. Foi apresentado pela primeira vez por Craig Reynolds em 1987, em seu algoritmo Boids, cujo algoritmo simula a revoada de pássaros.
Dentro desse conjunto de técnicas, existem diversos comportamentos que podem ser implementados em jogos, estudos e na robótica. Os comportamentos de busca (seek), fuga (flee) e chegada (arrival) são fáceis de serem implementados e apresentam excelentes resultados.
Para a utilização de steering behaviors, recomenda-se usar vetores geométricos para calcular as coordenadas com mais facilidade.
A classe do agente é chamada de “vehicle”. A classe Vehicle possui 2 atributos (variáveis locais) essenciais definidos como vetor:
A aceleração também pode ser adicionada, porém não será necessário nesse momento. Outras duas variáveis serão adicionadas e influenciarão diretamente o valor da posição e velocidade do agente:
A velocidade máxima é o limite que a velocidade do agente pode chegar. A força máxima é o limite que o steering (força de navegação) pode chegar.
class Vehicle {
constructor() {
this.position = createVector(width / 2, height / 2);
this.velocity = createVector(0, 0);
this.maxSpeed = 4;
this.maxForce = 0.2;
}
}
A posição inicial do agente será no centro da tela. Sua velocidade inicial será zero, por isso, não se moverá no início. O objetivo nesse tutorial é fazer o agente (Vehicle) perseguir algum objeto. Esse objeto será instanciado com o clique do mouse.
var target = null;
...
function mousePressed(event) {
let mousePos = createVector(event.x, event.y);
target = new Target(mousePos);
}
Em seguida, o algoritmo responsável por fazer o agente perseguir o objeto é implementado (implementação sem steering behaviors):
class Vehicle {
...
function seek() {
if (target != null) {
// Distância entre o alvo e o agente
let destination = this.position - target.position;
let direction = destination.normalize();
let desiredVelocity = direction * this.maxSpeed;
this.position += desiredVelocity;
}
}
}
A função “seek” será executada a cada frame e deslocará o agente aos poucos. A implementação de aproximação entre dois pontos pode ser realizada como mostra acima. O código irá funcionar e o agente irá perseguir o destino. Porém, a prática acima será um simples deslocamento de um objeto com a velocidade constante:
O deslocamento acima deixa muito a desejar quando falamos sobre jogos ou simulação de comportamentos de animais. Para tornar o movimento acima mais realístico usamos a técnica de steering behaviors.
O comportamento de busca é melhorado aplicando uma nova força, o “steering”. O “steering” é o resultado da subtração da velocidade deseja pela velocidade atual. Esse resultado será adicionado na velocidade do agente.
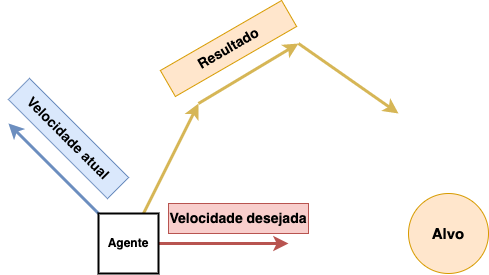
O resultado do movimento acima é um movimento circular do agente para a direita. A velocidade atual que estava apontada para o noroeste foi diminuindo aos poucos e perdendo a sua influência sobre o agente. A velocidade desejada passa a influenciar a posição do agente, fazendo-o com que chegue ao seu destino.
class Vehicle {
...
function seek() {
if (target != null) {
// Distância entre o alvo e o agente
let destination = this.position - target.position;
let direction = destination.normalize();
let desiredVelocity = direction * this.maxSpeed;
let steering = desiredVelocity - this.velocity;
steering = steering.limit(this.maxForce);
this.velocity += steering;
this.velocity = this.velocity.limit(this.maxSpeed);
this.position += this.velocity;
}
}
}
A variável “steering” será a força que resistirá à velocidade desejada. A função “limit” limita o valor máximo da variável, fazendo com que os valores não fiquem muito altos.
Diferente do primeiro exemplo, o agente mostra uma certa resistência ao modificar o seu trajeto. Esse efeito é bastante parecido com a inércia, fenômeno que acontece na vida real, pois não é possível anular uma força instantaneamente após aplicar outra.
A lógica do comportamento de fuga é totalmente igual ao comportamento de busca, a única diferença é que o agente irá fugir do alvo. Ao invés da sua velocidade desejada apontar para a direção do alvo, ela irá aponta para a direção contrária do alvo.
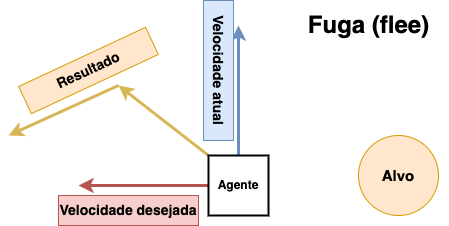
O agente irá repetir o mesmo movimento circular do comportamento de busca, alternando para a direção mais longe possível do alvo.
A função “flee” pode copiar a função “seek”. A única diferença é que a velocidade desejada irá ser negativa.
class Vehicle {
...
function flee() {
if (target != null) {
// Distância entre o alvo e o agente
let destination = this.position - target.position;
let direction = destination.normalize();
let desiredVelocity = direction * this.maxSpeed;
// Multiplica por -1 e torna o valor negativo
let flee = desiredVelocity * -1;
let steering = flee - this.velocity;
steering = steering.limit(this.maxForce);
this.velocity += steering;
this.velocity = this.velocity.limit(this.maxSpeed);
this.position += this.velocity;
}
}
}
Ao modificar o sinal do valor da velocidade desejada para negativo, o trajeto que o agente irá percorrer será contrário ao que era antes.
O comportamento de chegada será combinado com o comportamento de busca. Ao agente chegar no seu destino ele deve parar. A lógica do comportamento de chegada é desacelerar o agente aos poucos até ele entrar na fase de repouso encima do destino. A área de desaceleração da velocidade do agente é definida por um círculo ao redor do alvo. Quanto mais o agente penetra no círculo mais ele perde velocidade. Quando o agente chegar no centro do círculo (encima do alvo) a velocidade dele será zerada, entrando em repouso.
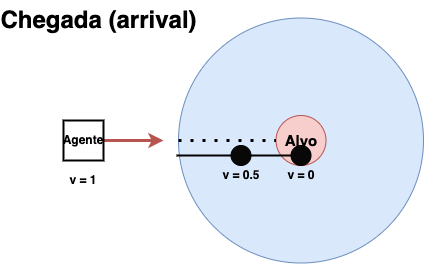
Para saber se estamos dentro do círculo de chegada, usaremos a magnitude do vetor da distância entre o agente e o alvo. Caso a magnitude da distância entre o alvo e o agente seja menor do que o raio do círculo de chegada, o processo de desaceleração é iniciado. O processo de desaceleração é feito diminuindo a magnitude da velocidade desejada conforme o agente se aproxima do centro do círculo.
class Vehicle {
...
function seek() {
if (target != null) {
// Distância entre o alvo e o agente
let destination = this.position - target.position;
let magnitude = destination.magnitude();
let desiredVelocity = destination.normalize() * this.maxSpeed;
if (magnitude < target.radius) {
let newMagnitude = map(magnitude, 0, target.radius, 0, this.maxSpeed)
desiredVelocity = desiredVelocity.setMagnitude(newMagnitude)
}
let steering = desiredVelocity - this.velocity;
steering = steering.limit(this.maxForce);
this.velocity += steering;
this.velocity = this.velocity.limit(this.maxSpeed);
this.position += this.velocity;
}
}
}
function map(number, inMin, inMax, outMin, outMax) {
return (number - inMin) * (outMax - outMin) / (inMax - inMin) + outMin;
}
A função “map” vai ajustar o valor da magnitude da velocidade desejada e manter o valor entre 0 e 4 (this.maxSpeed). Conforme a distância entre o agente e o alvo vai se aproximando, menor vai ficando a magnitude da velocidade desejada, até chegar no zero.
Os comportamentos de busca, fuga e chegada são uma porção do conjunto de comportamentos que steering behaviors (comportamentos de navegação) proporciona. Esses movimentos podem ser usados em vários tipos de aplicativos conforme as demandas dos desenvolvedores. A sua grande vantagem é a facilidade na sua implementação, não precisando de cálculos muito complexos e necessitando poucas linhas de código.
Projetos práticos
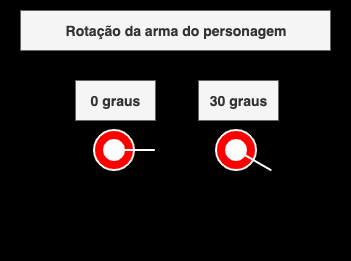
Usando lógicas matemáticas como trigonometria para criar e calcular o esqueleto de um jogo de tiro 2D em javascript

Jogo simples de guerra espacial desenvolvido em javascript. Esse jogo usa cálculos de física para simular efeitos de atrito e inércia.
Desenvolvimento dos conceitos mais básicos do clássico pacman, como: mapa, animação, deslocamento e detector de colisões.
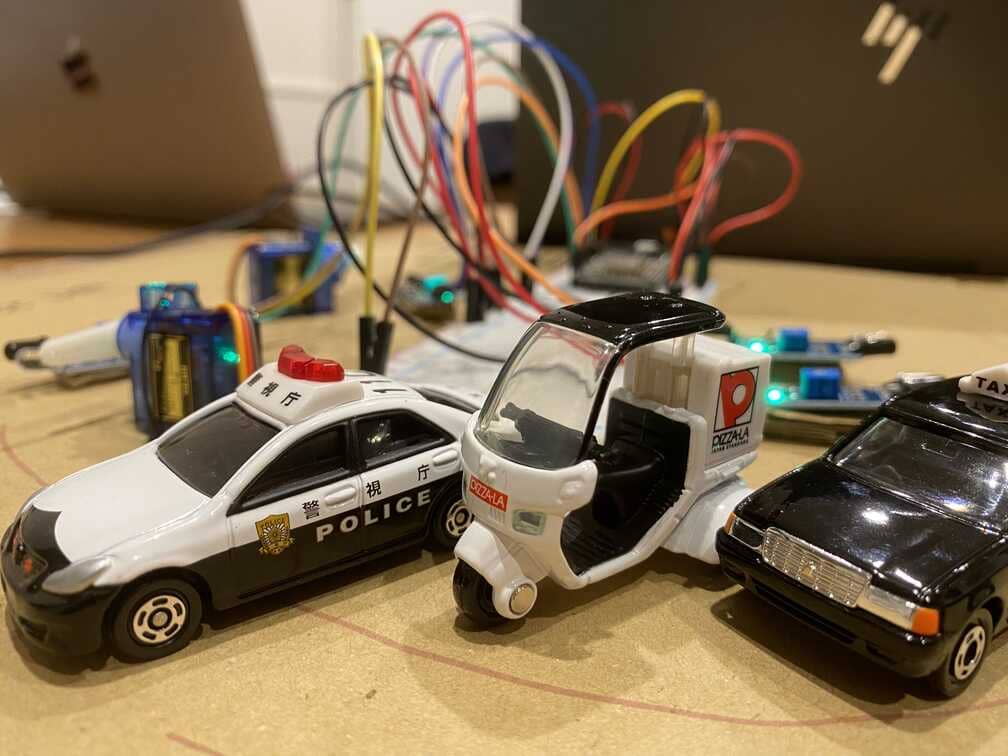
Desenvolvimento de um sistema de monitoramento que exibi todos os eventos que acontecem na garagem automatizada, como abertura de portões ou ocupação de vagas.
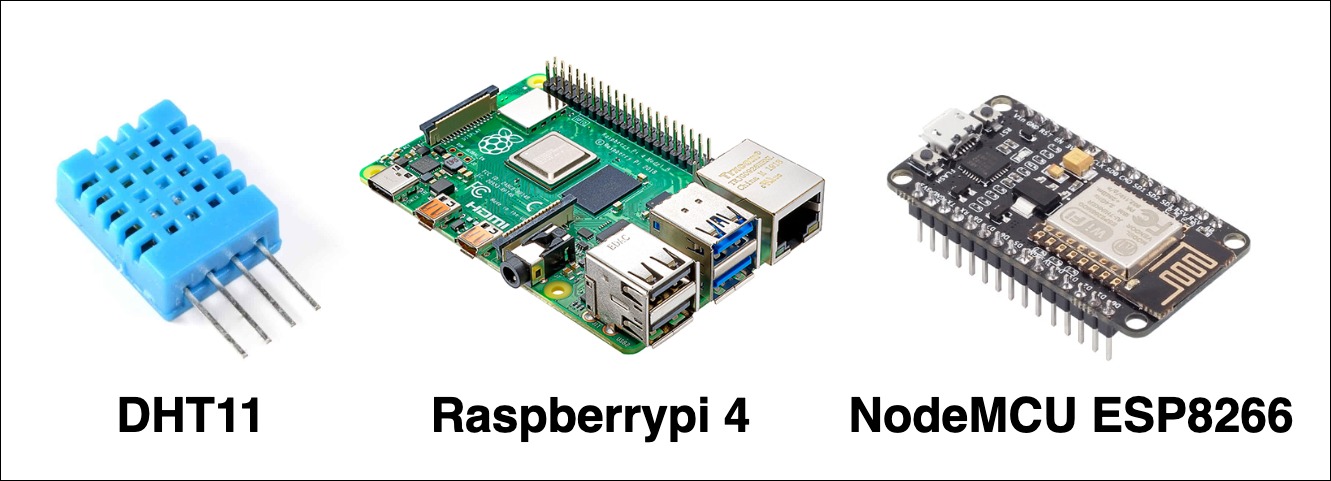
Projeto de comunicação entre dois dispositivos ESP8266 e Raspberrypi4. Laravel irá funcionar como servidor e receptor de dados de temperatura e umidade coletados com o DHT11.
Antes de podermos visualizar o site, o endereço que digitamos na barra de endereço do nosso navegador passa por várias etapas, para só então podermos visualizar o site pela primeira vez...
Quando nos conectamos à internet, nós recebemos um endereço IP. O endereço IP é o nosso endereço virtual que vai servir como localização para a transferência de dados na internet
A busca binária usa o método de divisão de conquista que visa em dividir os problemas em pequenos problemas até que eles se resolvam sozinhos.
Um dos comportamentos de navegação (steering behaviors). Faz com que um agente siga um caminho pré-determinado pelo desenvolvedor.
A busca linear é um algoritmo de força bruta não muito eficiente, mas com grande simplicidade, sendo utilizada regularmente por programadores.
Comportamento usado em steering behaviors para evitar que o agente se choque contra obstáculos durante o percurso do seu trajeto.